

במעבדה לביו-דינמיקה ומכניקה של תנועה בראשות ד”ר יזהר אור חוקרים את ההתנהגות של שחיינים זעירים כגון בקטריות ותאי זרע בתנאי סביבה שונים. מטרת המחקר הינה פיתוח שיטות לתכנון ובקרה של שחיינים רובוטיים בסקאלת מיקרומטר וננומטר לצורך תנועה אוטונומית בתוך גוף האדם וביצוע פעולות ביו-רפואיות. שחיינים בגודל זעיר שכזה מתאפיינים במשטר זרימה של מספרי Reynolds נמוכים מאוד, בהם אפקטים של גרר וצמיגות הם הדומיננטיים והשפעות של אינרציה הינן זניחות.
במסגרת מחקר תיאורטי, ד”ר אור חקר את הדינמיקה של שחיין זעיר בקירבת דופן קשיח וגילה שינויים במסלולי התנועה, בהם מגוון תופעות כגון תנועות מחזוריות גליות לאורך הדופן וכן תופעה של “משיכה” לקיר בעלת אפיון של יציבות פאסיבית בה השחיין מתכנס לתנועה במרחק קבוע מהקיר ללא צורך בהפעלת מדידות מיקום ובקרת משוב. תופעות דומות נצפו בעבר בניסויים של תנועת תאי זרע ובקטריות ליד דופן.
לצורך המחשת התוצאות התאורטיות, נבנו במעבדה מספר דגמים מוגדלים של שחיינים רובוטיים במסגרת פרוייקטי סיום של סטודנטים לתואר ראשון ובהנחיית משתלמים לתואר גבוה. השחיינים מופעלים ע”י מנועים חשמליים, ותנועתם נמדדת ע”י מצלמת אינפרה-אדום המותקנת בתקרת המעבדה. לצורך שמירה על מספר Reynolds נמוך, הניסויים נערכים בתוך אמבט של שמן סיליקון בעל צמיגות גבוהה מאוד (60,000 CSt). לצורך בחינת ההתנהגות לאורך זמן ליד דופן, נבחר אמבט שמן עגול (תמונה 1) בו ניתן לבצע תנועה היקפית לאורך מרחק בלתי מוגבל.

תמונה 1: מיכל עגול של שמן סיליקון
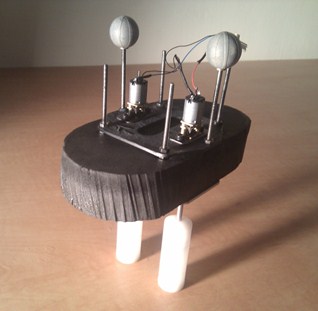
תמונה 2: שחיין רובוטי עם שני גלילים, מנועים ומצוף
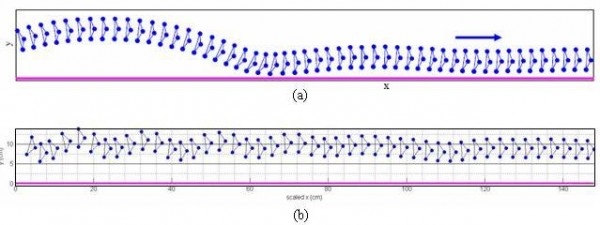
דגם אחד של השחיין מונע באמצעות סיבוב של שני גלילים על ידי מנועים חשמליים המותקנים על פלטת ציפה (תמונה 2). עבור שחיין זה, הניתוח התיאורטי מנבא מצב שווי משקל של תנועה במקביל לקיר בעל יציבות גבולית ביחס להפרות: הפרות קטנות משיווי המשקל יגרמו לתנודה גלית מחזורית (ציור 3), בעוד הפרות גדולות משיווי המשקל יגרמו לתנועה במסלול ציקלואידי (ציור 4).
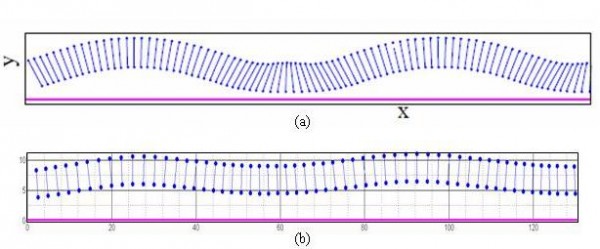
תמונה 3: מסלול גלי של תנודות לאורך הדופן: (a) תוצאות סימולציה, (b) תוצאות מדידה בניסוי (לאחר “יישור” הדופן)
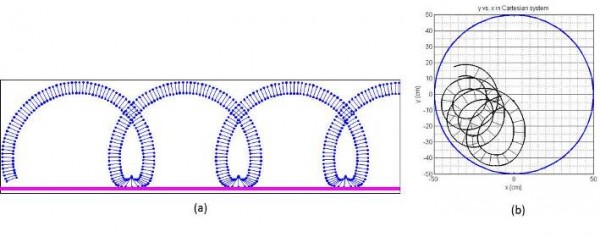
תמונה 4: מסלול תנועה ציקלואידי: (a) תוצאות סימולציה, (b) תוצאות מדידה בניסוי
עם הוספה של גליל שלישי בלתי ממונע המחובר באופן קשיח למצוף (תמונה 5), נמדדה עלייה של פי 2.5 במהירות השחייה ללא הגדלת ההספק החשמלי. תוצאה מפתיעה ובלתי אינטואיטיבית זו נחזתה בעבר ע”י מספר מחקרים, ומקורה בהגברת האינטראקציה ההידרודינמית בין הגלילים ע”י תנועת הנוזל במרווחים הקטנים שביניהם. בנוסף, הודגם כי לשחיין קיים כעת מצב יציב אסימפטוטית של שחייה במקביל לדופן, והמסלול מתכנס אליו באופן פסיבי תחת הפרות התחלתיות (תמונה 6), כתוצאה משבירת הסימטריה המבנית של השחיין.
דגם נוסף שנחקר הינו שחיין רובוטי בעל שלוש חוליות המחוברות ע”י מפרקים הממונעים באמצעות מנועי סרבו חשמליים (תמונה 7). הזוויות במפרקים משתנות בצורה מחזורית באופן שמדמה גל מתקדם לאורך זנב גמיש של מיקרואורגניזם. עבור שחיין זה שנקרא Purcell’s three-link swimmer נחקרות שיטות גיאומטריות לבקרת התנועה בכיוון רצוי, השפעות של נוכחות דופן על מסלולי התנועה ויציבותה, וכן השפעה של פרופיל מחזורי של מומנטים מוכתבים במנועים על ההשתנות הדינמית של צורת השחיין ויציבות מסלולים מחזוריים.
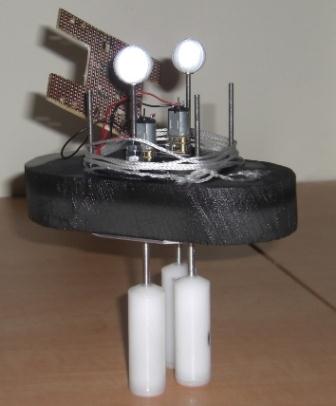
תמונה 5: דגם השחיין עם גליל נוסף בלתי ממונע
תמונה 6: התכנסות המסלול לתנועה יציבה במקביל לדופן:
(a) תוצאות סימולציה, (b) תוצאות מדידה בניסוי (לאחר “יישור” הדופן)
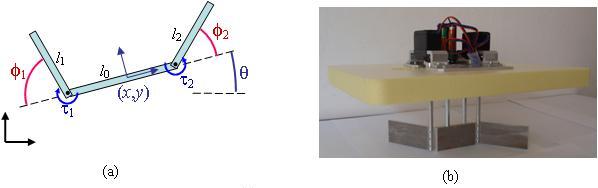
תמונה 7: השחיין בעל שלוש הזרועות של Purcell: (a) מודל תיאורטי, (b) דגם רובוטי לניסויים