
ייצור ופיתוח של רובוטים רגליים בעלי יכולת תנועה אוטונומית הינם אתגרים רבי חשיבות בקהילת החוקרים והמהנדסים בתחום הרובוטיקה. רובוטים כאלו עשויים לשמש למגוון יישומים של תנועה בשטח קשה – מחקלאות וביטחון ועד לטיולים, שיקום ועזרה למוגבלים וקשישים. כהשראה מיכולות התנועה הרגלית המרשימה של בני אדם ובעלי חיים, חלק גדול מן המחקר מתמקד בתנועת הליכה דינמית בה הגוף אינו נמצא בשיווי משקל סטטי בשום שלב אלא נופל קדימה עם רגל מונפת עד ליצירת אימפקט במגע עם הקרקע, ולאחר מכן הנפת הרגל האחורית וחוזר חלילה. עיקר האתגר הטכנולוגי והמדעי הינו במציאת שיטות לבקרה של התנועה המחזורית של הליכה דינמית בהתבסס על מדידות מחיישנים שונים, על מנת לשמור על יציבות ההליכה תחת הפרעות או תנאים משתנים.
אחד הגורמים המאתגרים ביותר להליכה יציבה הינו מצב של קרקע חלקה בעלת חיכוך מוגבל, אשר מוביל להחלקה של כפות הרגליים בזמן המגע. למרות העובדה שבעלי חיים מתמודדים בהצלחה עם תנועה רגלית בתוואי שטח חלקלק, רוב הרובוטים הרגליים הדינמיים מתקשים בכך. הסיבה העיקרית היא חוקי הבקרה הקיימים, אשר מתבססים על מודל תיאורטי שמניח כי כפות הרגלים יוצרות מגע קבוע עם הקרקע ללא החלקה ומתעלם ממגבלות חיכוך.
בעבודות קודמות בקבוצת המחקר של פרופסור חבר יזהר אור בטכניון, בוצעו סימולציות חישוב תוך שימוש במודלים תיאורטיים אשר מתחשבים במגבלות החיכוך ומאפשרים מעבר בין מצבי מגע והחלקה בתנועה רציפה וכן באימפקט. בביקור בקיץ 2018 במכון הטכנולוגי של קליפורניה (Caltech) במסגרת שבתון, פרופ׳ אור ביצע שיתוף פעולה עם מעבדת המחקר ברובוטיקה בראשותו של Professor Aaron Ames. בעבודתו של המשתלם לדוקטורט Wen-Loong Ma בהנחייתם של פרופ׳ אור ו-Ames, בוצעה הרחבה לשיטות הבקרה ותכנון מסלולי תנועה המתחשבים במצבי החלקה.
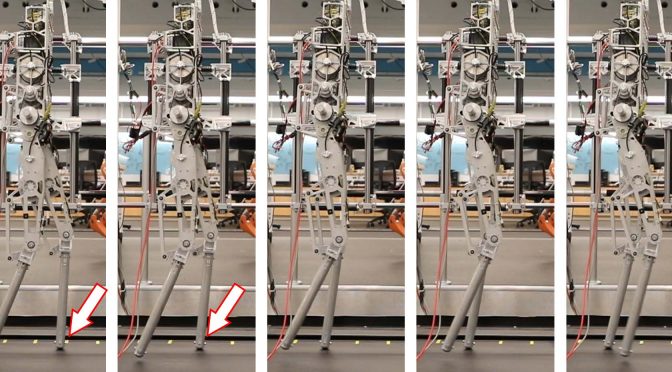
לצורך הדגמה בוצעו ניסויי תנועה על גבי הליכון במעבדה עבור רובוט דו-רגלי מישורי Amber בעל מפרקי ברכיים וחמש דרגות חופש ממונעות. לאחר שימון הסרט הנע של ההליכון ליצירת משטח חלקלק, אלגוריתם הבקרה המקורי של Caltech נכשל באופן מיידי בביצוע צעידה. מנגד, חוק הבקרה החדש המשלב החלקה בתכנון התנועה הצליח לייצר באופן יציב דפוס צעידה מחזורי הכולל החלקות, והפגין עמידות תחת טווח נרחב של מהירויות ההליכון, ותנאי חיכוך שונים (עם וללא שימון המשטח). תוצאות המחקר המשותף הוצגו במאמר ובסרטונים בכנס הרובוטיקה IEEE Conference in Robotics and Automation שהתקיים במאי 2019 במונטריאול, קנדה. קישור למאמר .
מחקרו של פרופ׳ אור בנושא ״דינמיקה היברידית של מערכות רובוטיות עם מגעים משתנים – אנליזה ויישומים זכה לאחרונה במענק מחקר ארבע-שנתי של הקרן הישראלית למדע (ISF)